强化学习理论笔记1——基本概念
1. 强化学习基本概念
1.1 A grid-world example(网格世界)
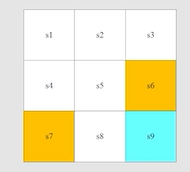
在本课程中,网格世界的例子将贯穿始终(如上图所示)
在这个网格世界中,有一个机器人在行走。
网格世界中的每一个小网格,它们有不同的类型,比如有的网格是accessible,即可以进入的,用白色来表示;有的网格是forbidden,即不可进入的,用黄色来表示;另外还有一个target area,即我们希望机器人进入的网格。
此外,这个网格世界还有一个边界。
不同机器人可以在相邻的网格之间移动,但不能再斜的方向进行移动。
我们为什么要考虑这样一个例子呢?因为这个例子非常易于理解,方便我们理解强化学习的很多概念
那么,强化学习在这个例子中所要完成的任务是什么呢?强化学习需要再这个例子中找到一个比较好的路径以到达目标位置,即target area。
在这里面,我们会遇到很多问题。比如我们该如何去定义一个路径它究竟是好是坏?这其实是一个非常核心的问题,我们在后面会详细讨论这个问题,即如何作出最好的决策。
下面我们便用这个例子来解释强化学习中我们遇到的第一个概念
1.2 State(状态)
state描述的便是agent(智能体)相对于环境的状态
那么在grid-world example中,state指的是什么?便是location。
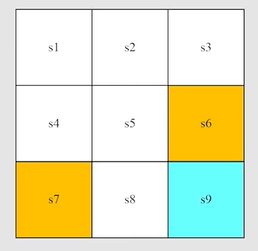
在上面这个网格中,一共有9个格子,即有9个location。我们便用 这几个字母来表示状态。这些字母本,比如,实际上它是一个索引,它在这个网格中对应的真正的状态当然是代表二维平面的位置,即
如果是更加复杂的问题,那么我们除了位置之外,还需要考虑速度,而如果是机器人的话,还要对加速度等其他类型的状态信息加以考虑
1.3 State space(状态空间)
在上面我们已经了解了状态的概念。
如果我们把所有的状态放到一起,我们就得到了状态空间state space。
状态空间的本质其实是一个集合set,什么意思呢?
如果我们以来表示状态空间,那么它就是把所有的状态放到一起得到的一个集合,用数学表达式表达即为:
1.4 Action(动作)
action(动作)代表的就是我们在每一个状态实际上是有一系列的可采取的行动,在grid-world example中,可采取的行动一共有五种,我们用来表示:
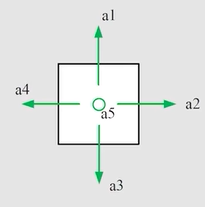
:向上移动 :向右移动 :向下移动 :向左移动 :原地不动
1.5 Action space(动作空间)
当我们将所用的动作放在一起,我们就得到了action space(动作空间)
和状态空间一样,它也是一个集合:
这里值得指出的一点是:动作空间是依赖于状态的,也就是说在不同状态下,便会有不同的动作空间。这也就是为什么在上面这个式子中要用到“”,这就表示动作空间A实际上是的一个函数
1.6 State transition(状态转移)
1.6.1 什么是 state transition?
当我们采取了一个action(动作)后,我们在grid-world example中便从一个状态转移到另外一个状态,这样的过程就被称为state transition。
举个例子,比如说在状态,我们采取的动作是(即向右移动),那么我们下一个状态就会跳到。这样一个过程用式子表示出来即:
当我们在状态,我们采取的动作是(即向上移动),那么由于机器人不能走出边界,所以我们的状态还是,用式子表示出来即:
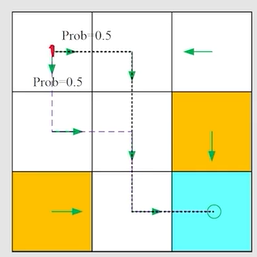
通过上面两个例子,我们知道state transition实际上是定义agent和环境的一种交互的行为,那我们在这里能否用其他的方式来定义这种交互的行为呢?首先,因为grid-world example是一种仿真,这是一个游戏,实际上我们可以任意去作定义,比如我们刚才在上面例子中是往上走的时候撞到边界了,我会被弹回到,其实也有可能被弹到另一个地方,比如,甚至可能会被弹到。因为grid-world example是一个游戏,我们想怎么定义就怎么定义。
而在实际当中并非如此,实际情况是不允许任意定义的。
1.6.2 考虑复杂情况
下面我们再来关注一下forbidden area。比如说我们在 ,如果我们采取了动作 ,那么下一个状态是?
情况一:forbidden area 可以进入,但是会伴随着惩罚,那么
情况二:forbidden area 不可进入,那么
在这两种情况中,情况一其实更加一般化,但也更加困难。为什么呢?
因为如果我们把一些状态给排除掉的话,状态空间就会变小,实际上我们做搜索的时候会更加容易。
而如果我们认为 forbidden area 是可以进入的话,其实就会出现一些比较有意思的现象,比如说虽然进入 forbidden area 会得到惩罚,但也许进入之后,通往 target area 反而是最近的路径,所以 agent 可能会冒险进入到 forbidden area ,然后通过 forbidden area 再抵达 target area。之后我们会详细介绍这些。
1.6.3 state transition 的表达方式(两种)
state transition 可以用下面这种 tabular 的形式表现出来:
| (upwards) | (rightwards) | (downwards) | (leftwards) | (unchanged) | |
|---|---|---|---|---|---|
上面的表格中,每一行对应一个状态,每一列对应一个动作
然而,虽然表格看起来很直观,但是在实际生活中,它的使用是受限的,因为它只能表示确定性的情况,而现实中的情况一般是有各种各样状态的,这时候表格就无法表达了。
所以这个时候,我们更一般的方法是什么呢?
便是用 State transition probability。(这里是我们第一次把 probability 引入到强化学习理论中来)
这个直观表达是什么呢?比如说我目前的状态是 ,我作出了动作 ,也就是要往右移动,下一个状态就是 。用数学表示即为:
虽然在上面这个例子中我们描述为确定性的状态,但是条件概率是可以用来描述随机性状态的例子的。比如说有北风的时候,我们在 状态下作出动作 后,可能我们下一个状态是 的概率是0.5、状态是 的概率是0.5,那么我们用数学表达式表示即为:
由此可见,写成概率的形式比写成表格的形式更加一般化。
1.7 Policy(策略)
1.7.1 什么是 Policy?
Policy 是强化学习当中独有的一个概念。什么是 Policy ?Policy会告诉 agent 在一个 state 状态下应该作出哪一个 action 动作。
1.7.2 如何表示 Policy?(两种)
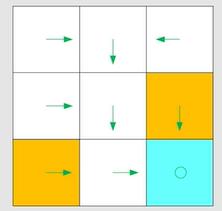
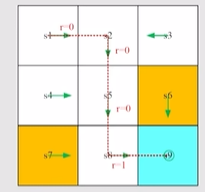
若要直观上理解 Policy,我们是用箭头来表示的。
我们可以看到上图中含有9个状态,而每一个状态都对应一个箭头(处的圆圈代表的是原地不动~)。基于这些箭头表示的策略,我们可以得到一些 path 或者叫 trajectory(如下图所示,之后会详细介绍)
用箭头来表示还是比较直观的。然而在现实当中,我们对于稍微复杂一点的情况便无法用如此直观的形式来表示,所以我们需要用一种能够描述复杂情况、一般化情况的方法,是什么呢?便是数学表达式,这里我们仍然选择条件概率。
我们举一个例子:针对状态 ,它的策略 (这里的 一般情况下我们是指圆周率,但是在强化学习中 就统一指的是策略,一个条件概率)指定了在任何一个状态 state 下作出任何一个动作 action 的概率是多少。对于,我们有如下表达式:
(所有策略的概率之和为1)
这里我们只写出了 ,其实对于这所有的9个状态,每一个状态都要有它对应的策略。此外,这里我们所写的均为确定性的 Policy(Deterministic Policy),也就是说 agent 在 处一定会选择作出动作 。
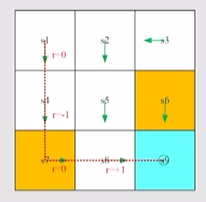
实际上,我们还存在不确定性的 Policy(Stochastic Policy),如下图所示:
用刚才所述的条件概率的形式来表示其实也非常简单,即:
当然,这样的策略也可以用表格的形式来表达出来:
| (upwards) | (rightwards) | (downwards) | (leftwards) | (unchanged) | |
|---|---|---|---|---|---|
| 0 | 0.5 | 0.5 | 0 | 0 | |
| 0 | 0 | 1 | 0 | 0 | |
| 0 | 0 | 0 | 1 | 0 | |
| 0 | 1 | 0 | 0 | 0 | |
| 0 | 0 | 1 | 0 | 0 | |
| 0 | 0 | 1 | 0 | 0 | |
| 0 | 1 | 0 | 0 | 0 | |
| 0 | 1 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 1 |
(但是这里我们还是不推荐使用表格,比较没法表示更一般的形式)
1.8 Reward(奖励)
1.8.1 什么是 Reward?
Reward 是强化学习中特有的一个概念。
首先 Reward 是一个数,是一个实数、标量,它是在 agent 采取一定动作后得到的。
这个数是有一定含义的:如果这个数是正数,则代表我们对这样的动作是鼓励的,而如果这个数是一个负数,代表我们不希望这样的行为发生,或者是对这个行为的一个惩罚。
这里面我们会遇到两个问题:
- 首先,如果我不设置 reward,或者将 reward 设置为0的话会代表什么呢?如果深究的话可能会有些复杂,笼统地说就是代表没有 punishment,而没有 punishment 在一定程度上就是鼓励。
- 还有一个问题是,我们能否用一个正数来代表 punishment,用负数来代表鼓励?实际上是可以的,而这也是数学上的一种技巧,本质上来说得到的东西是一样的。
1.8.2 如何设计 Reward?
这里我们还是举 grid-world example 的例子。
如果 agent 想要逃出四周的边界,每次它有这样的动作的时候,就令 如果 agent 想要进入 forbidden area ,那么每次它有这样的动作的时候,就令 如果 agent 到达了目标单元格,即 target cell,就令 其他所有的 agent 采取的动作,我们令
Reward 实际上可以被理解为一个 human-machine interface,即我们和机器进行交互的一种手段,因为 reward 设计还是相对比较直观的,所以我们可以借此引导 agent 应该怎样做、不应该怎样做。比如说在上面的例子中,通过设计奖励机制,便可以引导机器人不进入forbidden area 或是出界
1.8.3 如何表示 Reward?
当然我们也可以用一个表格来表示 reward,如下所示:
| (upwards) | (rightwards) | (downwards) | (leftwards) | (unchanged) | |
|---|---|---|---|---|---|
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | 0 | ||
| 0 | 0 | ||||
| 0 | 0 | 0 | |||
| 0 | 0 | 0 | 0 | ||
| 0 | 0 | ||||
| 0 | 0 | ||||
| 0 | 0 | ||||
| 0 |
同样的,表格表示的话会有一个问题:它的应用还是比较有限的,因为表格只能表示确定性的情况,而实际上我们会遇到很多不确定的状态。
因此,我们会采用条件概率的方法来表示更加一般化的情况。
比如说,我们举个例子:在状态 ,如果我们选择了动作 ,那么我们得到的reward就是-1,用数学表达式表示出来即:
在这里,我们有以下几点需要注意:
在现实中还会存在 stochastic(随机)的奖励。比如说我们学习地非常努力,我们一定会得到一个奖励,但具体可以得到多少是具有一定随机性的 Reward 一定是依赖于当前的状态 state 和动作 action,而不是依赖于下一个状态
1.9 Trajectory
1.9.1 什么是Trajectory?
Trajectory 实际上是一个 state-action-reward 的链
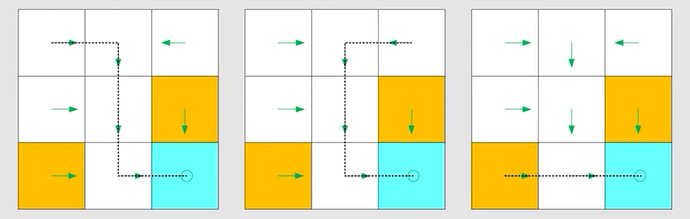
如上图所示的 trajectory 可以表示为:
1.9.2 return
这里我们还要介绍一个非常重要的概念——return。
一条 trajectory 的 return 即是将这条 trajectory 中的所有奖励 reward 相加所得的和,如下所示:
1.9.3 比较trajectory优劣
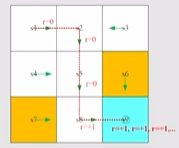
这里我们来看另外一条 trajectory,如下图所示:
将上图中的 trajectory 表示出来即为
这条 trajectory 的 return 为
那么在这里,这条 trajectory 和上文1.9.1中所介绍的 trajectory 相比,究竟哪一个 policy 比较好呢?其实直观上来说,我们会觉得第一个 policy 更好,毕竟第一个 policy 没进入到 forbidden area。但实际上我们应该从数学上来思考这个问题:因为第一个 trajectory 的 reward 更高,故其更好。
1.9.4 Discounted return
这里我们考虑一个特殊的情况,如上图所示。图中的 trajectory 表示出来即为:
这时,trajectory 的 reward为
这里的 trajectory 是无限长的,其 return 沿着其无穷长的轨迹不断累加下去的话,return 会发散掉。那我们应该如何解决这个问题呢?
这里我们需要引入 discount rate 。
有了 discount rate,我们就可以得到 discount return,如下所示
这里我们引入 discount return 得到了什么?首先,之前我们将 reward 相加之后 return 会发散掉,而现在 return 变成了一个有限的值。其次,discount return 能够去平衡这种更远未来能够得到的 reward 和更近未来能够得到的 reward。
同时,这里我们通过控制 的取值便能够控制 agent 所学到的策略。简单来说,当 较小的时候,agent会变得更加 近视,也就是说它会更加注重最近的一些 reward;而如果 比较大的时候它会变得更加远视。
1.10 Episode
类似于深度学习中的轮数,用于区分 terminal states 和 continuing tasks
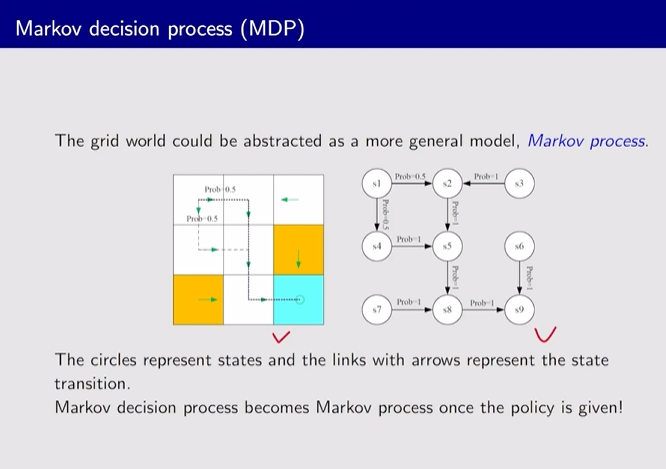
1.11 MDP(Markov decision process 马尔科夫链)
到此为止,我们已经将强化学习中一些比较基本的概念,通过例子的形式介绍完了。接下来我们需要把这些概念放到 MDP 框架当中,用更加正式的方式来重新介绍一下这些概念。
这里直接放图来解释(其实因为我太懒了…):
小结: