
DBSCAN 密度聚类分析算法
2025/4/15
机器学习
1. DBSCAN 算法简介
DBSCAN 是一种基于密度的聚类算法,旨在发现任意形状的簇,并且对噪声点(outliers)具有鲁棒性。
DBSCAN 通过在数据空间中找到高密度区域,将这些区域作为簇,同时把孤立点(密度低的点)归为噪声。
DBSCAN 的基本思想是:
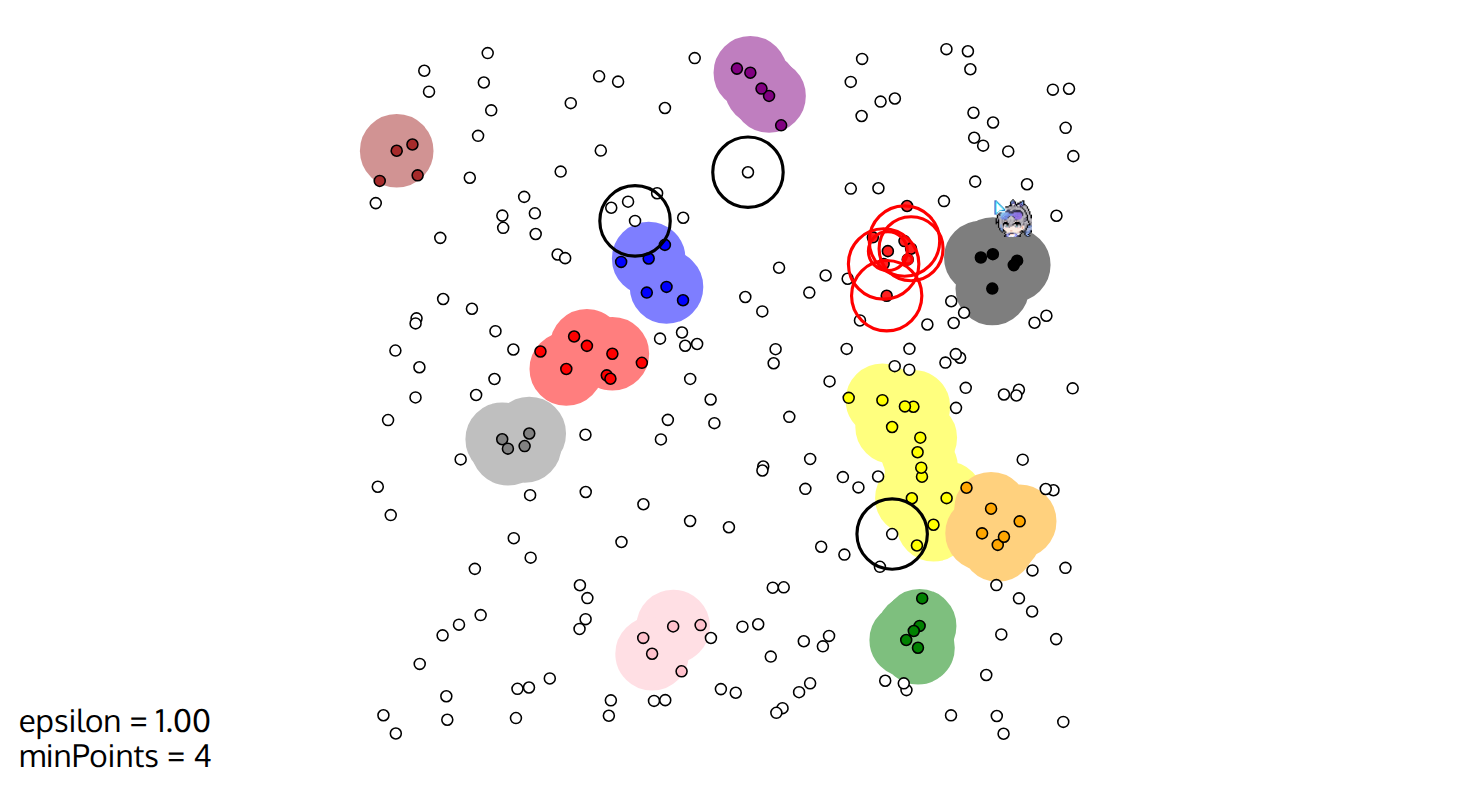
- 在某个点的邻域半径($\epsilon$,epsilon)内,如果有足够多的点(超过一个阈值 minPts),就认为这个区域是一个高密度区域,可以扩展成一个簇。
- 一个簇通过密度相连(density-connected)的点进行扩展。
- 无法归属于任何簇的点被认为是噪声点。
可以前往 DBSCAN 数据可视化网站来了解执行的流程。
2. DBSCAN 的基本概念
- $\epsilon$-邻域(Epsilon-neighborhood)
对于某个点 $P$,以半径 $\epsilon$ 为边界的区域内所有的点称为该点的 $\epsilon$ 邻域。 - 核心点(Core Point)
如果一个点 $P$ 的 $\epsilon$ 邻域内至少有 minPts 个点(包括 $P$ 自己),那么它被称为核心点。 - 边界点(Border Point)
如果一个点 $P$ 在某个核心的 $\epsilon$ 邻域内,但自身不是核心点,它被称为边界点。 - 噪声点(Noise Point)
如果一个点既不是核心点,也不属于任何核心点的领域,它被认为是噪声点。 - 密度直达(Directly Density-Reachable)
如果点 $P$ 是核心点,并且点 $Q$ 在 $P$ 的 $\epsilon$ 邻域内,那么 $Q$ 被称为 $P$ 的密度直达。 - 密度可达(Density-Reachable)
如果存在一条核心点链表($P_1 \rightarrow P_2 \rightarrow … \rightarrow P_n$),使得每个点从前一个点密度直达,且 $P_1=P$,$P_n=Q$,则 Q 是从 P 密度可达的。 - 密度相连(Density-Connected)
如果存在一个点 $O$,使得 $P$ 和 $Q$ 都从 $O$ 密度可达,则称 $P$ 和 $Q$ 是密度相连的。
3. DBSCAN 算法步骤
- 初始化
从数据集中任意选择一个点 $P$,判断它是否为核心点(即 $\epsilon$ 邻域内是否包含至少 minPts 个点)。 - 扩展簇
如果 $P$ 是核心点,则开始一个新簇,将 $P$ 及其邻域中的点加入簇中,并不断对新的核心点的邻域进行扩展。 - 处理噪声点
如果一个点既不在任何簇中,也不满足成为核心点的条件,则将其标记为噪声点。 - 重复处理
继续检查所有未访问的点,直到所有点都被访问为止。
4. DBSCAN 伪代码
DBSCAN(D, epsilon, minPts):
C = 0 # 初始化簇标签
for each unvisited point P in dataset D:
mark P as visited
Neighbors = getNeighbors(P, epsilon) # 获取邻域内的所有点
if size(Neighbors) < minPts:
mark P as NOISE # 认为该点是噪声
else:
C = C + 1 # 创建新簇
expandCluster(P, Neighbors, C, epsilon, minPts)
expandCluster(P, Neighbors, C, epsilon, minPts):
add P to cluster C
for each point Q in Neighbors:
if Q is not visited:
mark Q as visited
NeighborsQ = getNeighbors(Q, epsilon)
if size(NeighborsQ) >= minPts:
Neighbors = Neighbors U NeighborsQ # 扩展簇
if Q is not yet assigned to any cluster:
add Q to cluster C
5. DBSCAN 的时间复杂度分析
- 邻域查询:在每次扩展时,需要查找一个点的 $\epsilon$ 邻域。如果使用 KD-Tree 或 Ball-Tree 等空间索引结构,这个操作的复杂度为 $O(\log n)$。
- 总体复杂度:如果对每个点进行邻域查询,算法的时间复杂度为 $O(n·\log n)$。如果不使用索引结构,最坏情况下是 $O(n^2)$。
6. DBSCAN 的 Python 实现
方法一:使用 scikit-learn
聚类代码如下
from sklearn.cluster import DBSCAN
import numpy as np
# 生成示例数据
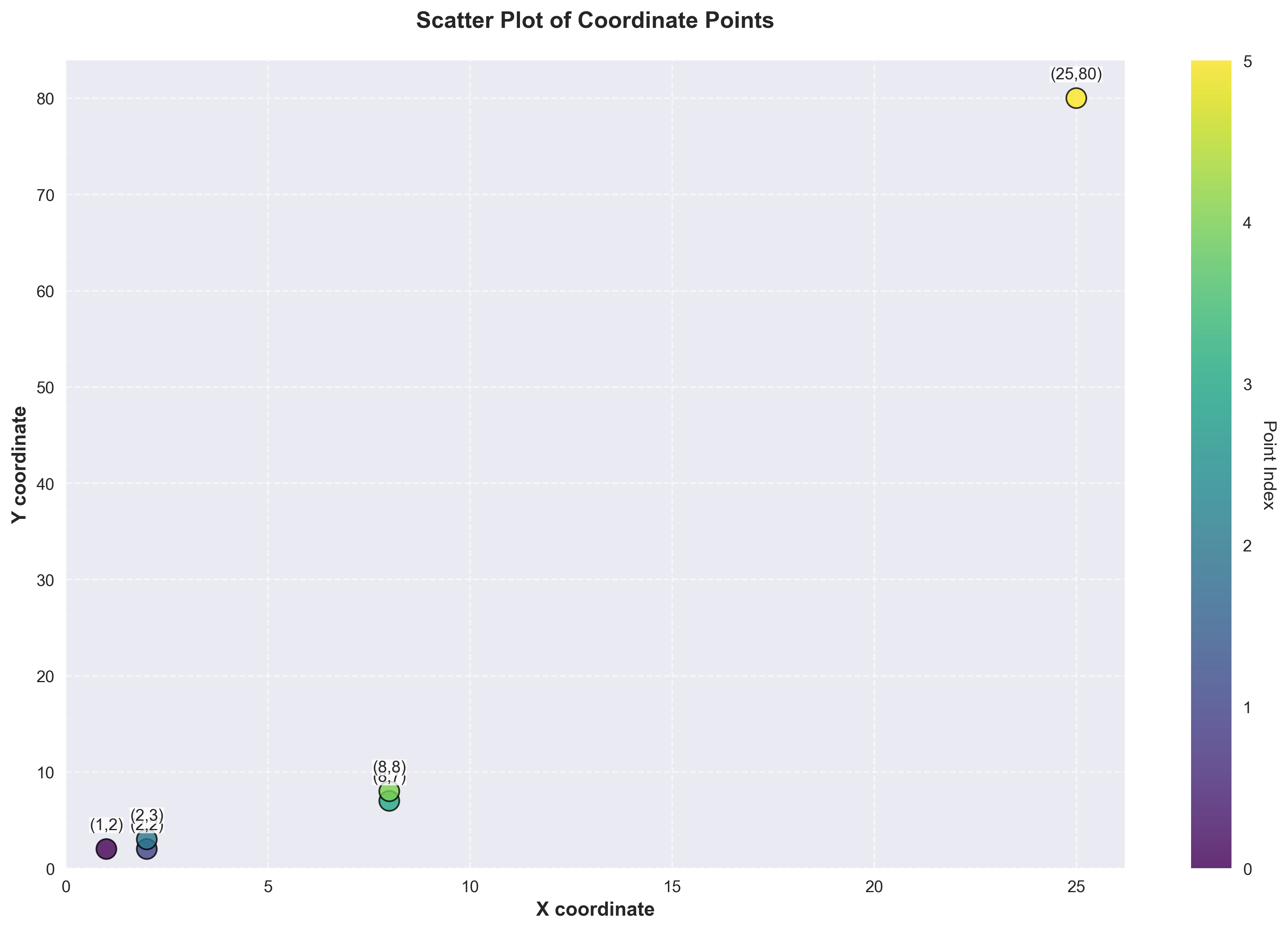
X = np.array([[1, 2], [2, 2], [2, 3],[8, 7], [8, 8], [25, 80]])
# 初始化 DBSCAN 模型
db = DBSCAN(eps=3, min_samples=2).fit(X)
# 获取聚类标签
labels = db.labels_
print("Cluster labels:", labels)
输出:
Cluster labels: [ 0 0 0 1 1 -1]
其中:
- 标签为
-1的点表示噪声点 - 其他标签表示该点属于的簇
方法二:手动实现
import numpy as np
from sklearn.metrics import pairwise_distances
class DBSCAN:
def __init__(self, eps=1.0, min_samples=5):
self.eps = eps
self.min_samples = min_samples
def fit(self, X):
# 计算所有点之间的距离矩阵
distances = pairwise_distances(X)
# 初始化标签:0表示未访问,-1表示噪声
labels = np.zeros(X.shape[0], dtype=int)
cluster_id = 0
for i in range(X.shape[0]):
if labels[i] != 0: # 已访问过的点跳过
continue
# 找到当前点的所有邻居
neighbors = self._find_neighbors(i, distances)
if len(neighbors) < self.min_samples:
labels[i] = -1 # 标记为噪声
else:
cluster_id += 1
self._expand_cluster(i, neighbors, labels, cluster_id, distances)
self.labels_ = labels
return self
def _find_neighbors(self, point_idx, distances):
"""找到给定点的所有ε-邻域内的邻居"""
return np.where(distances[point_idx] <= self.eps)[0]
def _expand_cluster(self, point_idx, neighbors, labels, cluster_id, distances):
"""从核心点扩展聚类"""
labels[point_idx] = cluster_id
i = 0
while i < len(neighbors):
current_point = neighbors[i]
if labels[current_point] == -1: # 如果是噪声,改为边界点
labels[current_point] = cluster_id
elif labels[current_point] == 0: # 如果是未访问点
labels[current_point] = cluster_id
# 找到当前点的所有邻居
current_neighbors = self._find_neighbors(current_point, distances)
if len(current_neighbors) >= self.min_samples:
# 将新邻居加入列表(合并邻居)
neighbors = np.concatenate([neighbors, current_neighbors])
i += 1
# 测试代码
if __name__ == "__main__":
# 使用你提供的示例数据
X = np.array([[1, 2], [2, 2], [2, 3], [8, 7], [8, 8], [25, 80]])
# 创建并运行DBSCAN
dbscan = DBSCAN(eps=3, min_samples=2)
dbscan.fit(X)
# 打印结果
print("聚类结果:", dbscan.labels_)
# 可视化结果
import matplotlib.pyplot as plt
plt.figure(figsize=(10, 6))
colors = ['red', 'blue', 'green', 'purple', 'orange']
for i in range(len(X)):
if dbscan.labels_[i] == -1:
plt.scatter(X[i, 0], X[i, 1], c='black', marker='x', s=100, label='Noise' if i == 0 else "")
else:
plt.scatter(X[i, 0], X[i, 1], c=colors[dbscan.labels_[i] - 1],
label=f'Cluster {dbscan.labels_[i]}' if i == 0 or dbscan.labels_[i] != dbscan.labels_[i-1] else "")
plt.title('DBSCAN Clustering Result')
plt.xlabel('X coordinate')
plt.ylabel('Y coordinate')
plt.legend()
plt.grid(True)
plt.show()
7. DBSCAN 的优缺点
- 优点:
- 可以发现任意形状的簇。
- 不需要预先指定簇的数量。
- 对噪声有鲁棒性。
- 缺点
- 当簇的密度差异较大时,效果不佳。
- 高维数据(超过 10 维)中的性能较差,非常消耗 CPU 和 GPU 以及内存性能。
- 需要合理选择 $\epsilon$ 和 minPts 参数。